
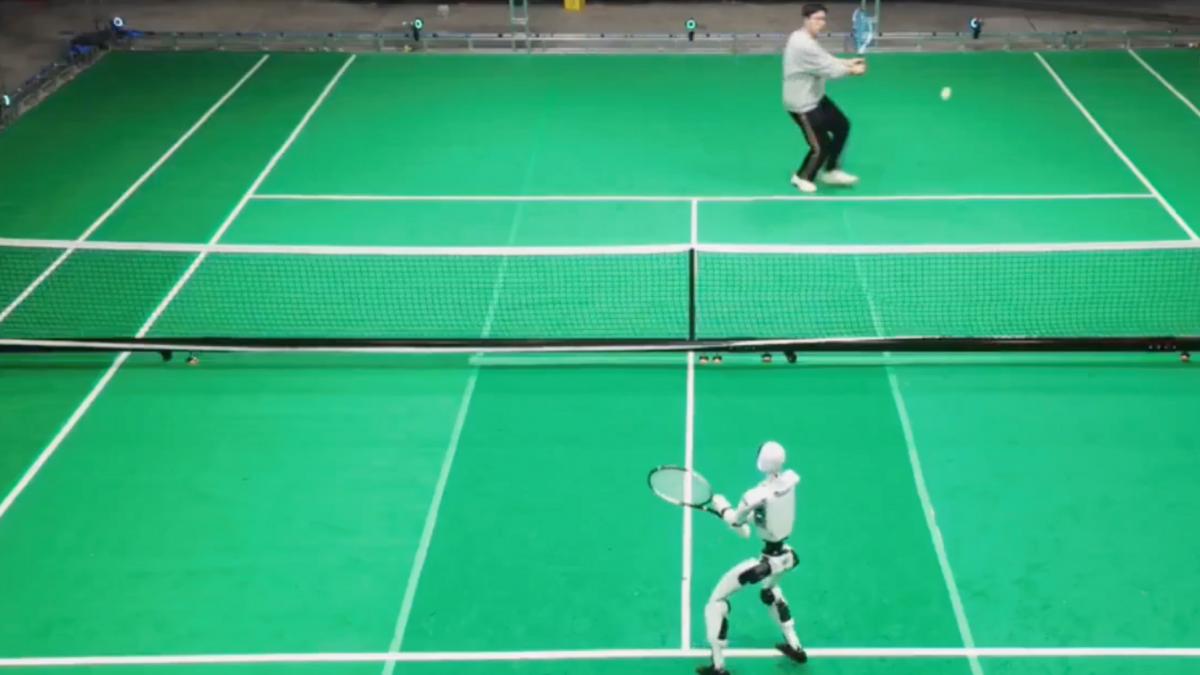

Galbot Robotics a publicat, luni, un videoclip pe contul său oficial de X, în care un robot umanoid schimbă mingi de tenis în timp real cu un jucător uman.
Demonstrația evidențiază sistemul LATENT al companiei, dezvoltat în colaborare cu cercetători de la Universitatea Tsinghua și Universitatea Peking. Sistemul a fost testat pe robotul umanoid Unitree G1, care a demonstrat capacitatea de a reacționa la mingi rapide, de a se deplasa pe teren și de a susține schimburi de mingi cu un adversar uman, potrivit Interesting Engineering.
„Pentru prima dată, un robot umanoid poate susține schimburi de tenis dinamice, pe durate lungi, cu reacții la nivel de milisecunde, lovituri precise și mișcări naturale ale întregului corp”, se arată în postarea Galbot pe X.
Antrenarea roboților cu date limitate de mișcare
Una dintre principalele provocări în antrenarea roboților pentru sporturi este lipsa unor date precise despre mișcările umane. Acest lucru este valabil mai ales în tenis, unde jucătorii acoperă suprafețe mari, mingile pot atinge viteze de până la 30 m/s, iar contactul dintre rachetă și minge durează doar câteva milisecunde.
Pentru a depăși această problemă, cercetătorii au evitat înregistrarea meciurilor complete. În schimb, s-au concentrat pe colectarea unor fragmente scurte de mișcări esențiale, precum forehand-uri, backhand-uri și pași laterali.
Datele au fost captate cu ajutorul unui sistem de urmărire a mișcării, într-un teren compact de 3×5 metri, de peste 17 ori mai mic decât un teren standard de tenis. În total, cinci jucători au contribuit cu aproximativ cinci ore de date de mișcare înregistrate.
?Your humanoid tennis player is here!?
— Galbot (@GalbotRobotics) March 16, 2026
Introducing LATENT (Learning Athletic Humanoid Tennis Skills from Imperfect Human Motion Data) — the world’s first real-time whole-body planning and control algorithm for athletic humanoid tennis.
For the first time, a humanoid robot can… pic.twitter.com/gCi38wxHVQ
De la mișcări de bază la joc coordonat
Folosind acest set de date, sistemul LATENT antrenează mai întâi robotul să reproducă mișcări individuale. Aceste acțiuni învățate sunt apoi combinate în secvențe care permit robotului să îndeplinească sarcini specifice, inclusiv deplasarea către minge, executarea unei lovituri și revenirea într-o poziție prestabilită pe teren.
Pentru a îmbunătăți performanța în condiții reale, modelul a fost antrenat într-un mediu de simulare în care parametri fizici importanți, precum masa robotului și a mingii, frecarea și aerodinamica, au fost variați aleatoriu. Această abordare a contribuit la reducerea diferențelor dintre antrenamentul în simulare și condițiile din lumea reală.
„Ideea noastră principală este că, deși imperfecte, aceste date cvasi-realiste oferă totuși indicii despre abilitățile primitive umane în scenarii de tenis”, au explicat cercetătorii.
„Prin corecții și combinări ulterioare, am învățat o politică pentru un robot umanoid capabil să lovească constant mingile primite într-o gamă largă de condiții și să le returneze către zone țintă, păstrând în același timp un stil natural de mișcare”, au adăugat aceștia.
Validare în condiții reale
În testele de simulare, sistemul a atins o rată de succes de până la 96% pentru loviturile de forehand. Atunci când a fost implementat pe robotul real Unitree G1, acesta a demonstrat capacitatea de a menține schimburi de mingi cu un jucător uman și de a returna constant mingea în terenul advers.
Cercetătorii au subliniat că această abordare ar putea fi extinsă dincolo de tenis, către alte domenii în care colectarea completă a datelor despre mișcările umane este dificilă, inclusiv fotbal, badminton și alte abilități robotice legate de sport.
„Deși această lucrare se concentrează în principal pe sarcina de returnare a mingii în tenis, cadrul propus are potențialul de a fi generalizat la o gamă mai largă de sarcini, acolo unde datele complete și de înaltă calitate despre mișcările umane nu sunt disponibile”, au concluzionat aceștia.

























